Queue management, flow control, arbitration and scheduling are design trade-offs that are based on the following variables
1. Number of input streams
2. Data rates
3. Queue depths
4. Scheduling or scanning or polling logic
5. Credit policy
6. External flags
This is a stochastic model running monte-carlo simulation to explore the quality of service and determine the required throughput. This model requires knowledge of buffer state and usage at multiple locations, before making a decision on data transfer. The ingress and egress can have a large number of channels and virtual connections. Components are modeled using Traffic, ExpressionList, Queues (FIFO) and Servers (FIFO + Processing Delay). The logic is constructed using the Script or Finite State Machine. Reports generated will be latency, buffer occupancy, and throughput.

Performance models are created using Resource and Behavior blocks. Performance modeling focuses on the overall system metrics such as power, performance and cost.
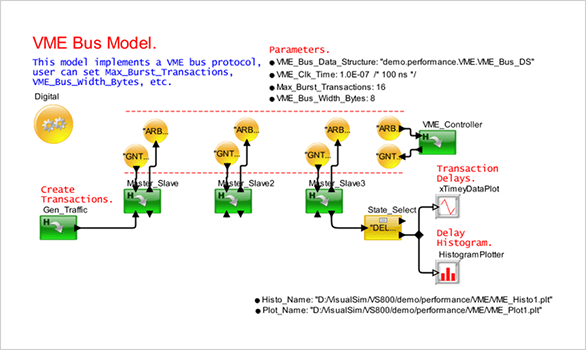
These analyses are used to identify capacity limitations and system bottlenecks. Performance models tend to be based on event trigger and do not run at cycle-accurate resolution. Performance models are constructed during systems engineering and proposal phase. At this stage of the design, a lot of unknowns need to be resolved, specification must be quantified and software behavior must be defined. Figure 13 shows the performance model of a Hardware Sub-System containing a Bus + Master/Slave devices.
Architecture Exploration is a detailed and accurate exploration of a system platform. The system platform can be a SoC, software or a network of systems containing hardware and software.
The focus is on sizing the individual components, distribution of tasks on to the distributed system connected by networks, partition into hardware and software. The evaluation is for both Power and Performance.

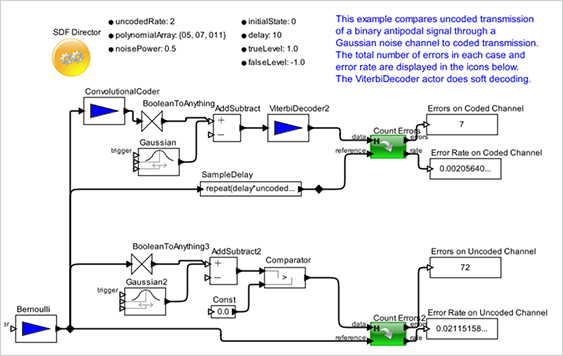
Signal processing algorithmic model that is assembled using the Mathematic Functions and Application-specific libraries. Algorithmic modeling is used to evaluate the control, DSP, image processing and analog behaviors. The emphasis is on the correctness of the mathematics. The standard analysis recorded are Bit-error rate, Signal-to-noise ratios, waveforms and pole diagrams.
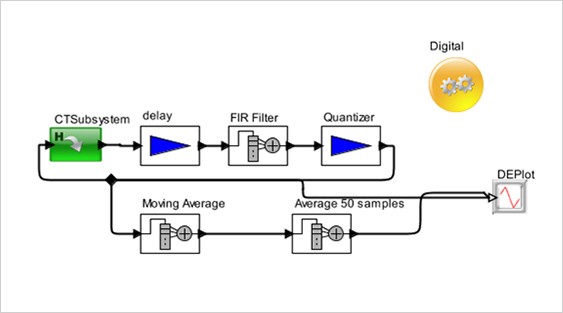
Mixed signal and control system modeling requires the knowledge of two different time domains- one where the time changes in a continuous manner (Continuous) and the other where the time moves in discrete but random distances (Discrete Event). Good examples of control system design are MEMS accelerometers and evaluating the impact on the engine control in a noisy car tracking situation. For mixed signal, the Sigma-Delta A/D converter in Figure 15 is a good design target. Here the evaluation is to look at the impact of frequency and signal changes over time. Another aspect is the loss of data when moving from one time domain to another.